Data Collection & Processing
Module (DCPM)
A fully custom, self-contained computing and signal-processing engine designed to operate directly at the antenna feed — eliminating RF losses, enabling simultaneous multi-receiver operation, and bringing real-time scientific workflows to the most demanding deep-space missions.
The Data Collection and Processing Module (DCPM) is a specialized, high-performance computing system designed to collect, process, store, and analyze data directly at the antenna feed. By moving computation to the source, the DCPM eliminates the limitations of traditional control-room PCs and enables powerful real-time scientific workflows.
Built for flexibility and field operation, the DCPM acts as a self-contained computer, data-storage platform, and signal-processing engine, supporting multiple receivers and complex mission-critical tasks simultaneously.
All hardware, firmware, and software — including the custom automation scripts, multi-OS integration layer, and remote management system — were designed in-house by Alex K6VHF. No off-the-shelf data acquisition solution existed that met the demanding requirements of simultaneous multi-receiver deep-space operations at the feed point.
- RF losses across long coaxial cable runs from feed to control room
- Single-device limitation — typically only one receiver at a time
- High latency; processing far from the antenna source
- Complex wiring harness and control-room dependency
- Bandwidth bottleneck between antenna and processing PC
- Difficult to expand without major infrastructure changes
- Processing at the feed — zero long-coax RF loss
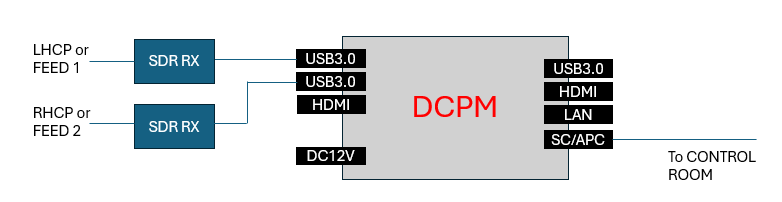
- Up to 3 simultaneous SDR/receivers via USB 3.0 at 5 Gb/s each
- Real-time processing and analysis with sub-millisecond latency
- Fully self-contained — no control-room dependency for acquisition
- High-speed fiber or Ethernet backhaul for processed data only
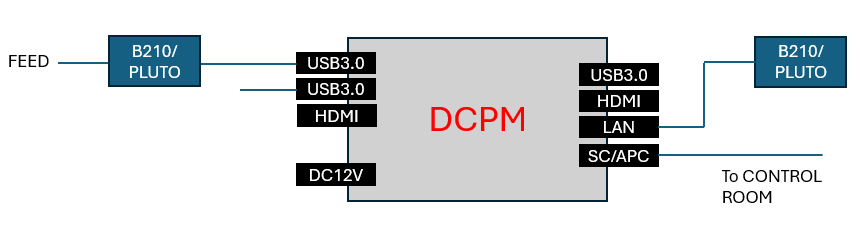
- Modular — multiple DCPM units can be interconnected

The DCPM integrates two independent compute nodes — a Raspberry Pi 5 running Linux and an Intel NUC Box G5 running Windows — into a single compact enclosure. Both nodes share a common 5V / 10A power rail and communicate via internal Gigabit Ethernet.

FIBER — SC/APC optical uplink
RPI USB 3.0 — Direct SDR connection
DC 12V — Field power input
CTRL — Multi-pin control bus
PC I/O — NUC Box G5 interface
SDRs and receivers connect directly via USB 3.0 to whichever compute node runs their driver stack. Processed data flows out via a single Ethernet or fiber uplink to the control room, dramatically reducing cable complexity while eliminating all analog RF loss.
 DCPM V1.05 — Top view, specification label
DCPM V1.05 — Top view, specification label
 DCPM — Internal layout, dual-node wiring
DCPM — Rear I/O: Ethernet · Fiber · USB 3.0 · DC 12V
DCPM — Internal layout, dual-node wiring
DCPM — Rear I/O: Ethernet · Fiber · USB 3.0 · DC 12V
DCPM V1.05 | Physical dimensions: 7″ × 4.5″ × 3.5″ | Weight: 3 lbs | Enclosure: Rugged aluminum (Floyd Glick WD0CUJ)
Rear I/O panel features field-ready mil-spec connectors: Ethernet (1 GBit), Fiber Optic SC/APC, RPi USB 3.0, DC 12V in, CTRL multi-pin, and PC I/O — all sealed for outdoor antenna feed deployment.
| CPU | Broadcom BCM2712 — Quad-core ARM Cortex-A76 @ 2.4 GHz, 64-bit |
| Cache | 512 KB per-core L2 + 2 MB shared L3 with crypto extensions |
| GPU | VideoCore VII — OpenGL ES 3.1, Vulkan 1.2 |
| RAM | 16 GB LPDDR4X-4267 SDRAM |
| Storage | NVMe SSD via PCIe 2.0 × 1 (M.2 HAT) |
| USB | 2 × USB 3.0 (5 Gb/s each) + 2 × USB 2.0 |
| Network | Gigabit Ethernet with PoE+ support |
| Display | Dual 4Kp60 HDMI with HDR (not required in field operation) |
| RTC | Real-time clock with external battery backup |
| OS | Linux (Raspberry Pi OS / Debian) |
| CPU | Intel Alder Lake N97 — 4C/4T, 6 MB cache, 2.0–3.6 GHz |
| GPU | Intel UHD Graphics @ 1.2 GHz |
| RAM | 12 GB LPDDR5 4800 MT/s |
| Storage | 256 GB M.2 2242 SATA (expandable to 2 TB) |
| USB | 3 × USB 3.2 Gen 1 |
| Network | 2.5G Ethernet + WiFi 5 (802.11ac) + Bluetooth 5.0 |
| Display | 2 × HDMI 2.0 — 4K@60Hz dual output |
| Power | 12V / 3A (100–240V AC input) |
| OS | Windows 10/11 |
| Internal storage total | 640 GB (NVMe + SATA combined) |
| External storage | Up to 4 TB via USB 3.0 SSD |
| DC-DC converter | 5V output, up to 10A — powers both nodes and connected SDRs |
| Enclosure | Aluminum — 7″ × 4.5″ × 3.5″, 3 lbs |


- GNU Radio + UHD for SDR signal processing
- Python automation scripts and pipelines
- PRESTO pulsar timing suite
- GQRX, SDR++, rtl_sdr tools
- Custom C++ real-time signal analyzers
- SSH + VNC remote access
- WSJT-X, SDR Console, SDRuno
- Spectrum Lab, SpectrumSpy
- Windows-only vendor drivers and tools
- C# / .NET scientific automation
- Remote Desktop (RDP) access
- Java-based mission control software
Both operating systems run simultaneously and are accessed remotely via TCP/IP — no monitor, keyboard, or mouse is required at the feed point. The DCPM presents itself on the network as two independent machines, both accessible from the control room over a single Ethernet or fiber uplink.